Inspirés par la similitude avec les nageurs à faible nombre de Reynolds dans les fluides, nous avons créé la première théorie de la force résistive pour les milieux granulaires afin de prédire les forces et les mouvements. L’idée clé est le principe de superposition : les forces sur les corps et les jambes de forme complexe se déplaçant dans un milieu granulaire le long d’une trajectoire arbitraire peuvent être bien approximées par la superposition des forces sur chacun de leurs éléments (Fig. 1). Le principe d’intégration est valable pour les nageurs à faible Reynolds car, les effets d’inertie étant négligeables, les flux de fluides autour des éléments sont suffisamment locaux pour que la force granulaire exercée sur un élément soit indépendante de celle exercée sur les autres éléments. Considérant cela, nous avons émis l’hypothèse que la théorie de la force résistive fonctionnerait également pour les milieux granulaires.
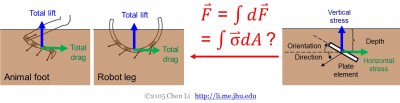
Figure 1. Principe de superposition de la théorie de la force résistive.
Mesures de la force résistive
Parce que les animaux et les robots ont une morphologie et une cinématique complexes, chaque élément de leur corps et de leurs jambes peut non seulement être à différentes profondeurs, mais aussi avoir différentes orientations et directions de mouvement (Fig. 1, gauche). Pour les nageurs à faible nombre de Reynolds dans les fluides, la façon dont la force dépend de l’orientation et de la direction peut être dérivée de la loi de Stokes. Mais pour les milieux granulaires, nous ne savons pas comment la force dépend d’eux car de telles équations n’existent pas. Par conséquent, nous avons utilisé un élément de plaque pour effectuer les premières mesures des forces granulaires en fonction de l’orientation et de la direction de l’intrus (Fig. 1, droite).
Nous avons découvert que la force (contrainte) dépend de manière sensible à la fois de l’orientation et de la direction (Fig. 2, gauche). La force verticale est maximale lorsque l’intrus de la plaque est orienté horizontalement et pénètre vers le bas. Dès que l’orientation s’écarte de l’horizontale et que la direction s’écarte du bas, la force verticale diminue rapidement.
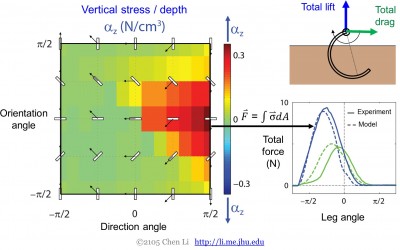
Figure 2. Mesures de la force résistive et validation de la théorie. Seules les mesures de force résistive verticale sont présentées pour des raisons de simplicité.
Validation de la théorie de la force résistive
À l’aide de nos mesures de force résistive granulaire, nous avons intégré les contraintes sur les éléments de la jambe et découvert que la théorie de la force résistive peut bien prédire les forces totales de soulèvement et de traînée sur une jambe de robot déplacée dans un milieu granulaire (figure 2, à droite). Grâce au principe de superposition, le modèle est précis pour des jambes de forme et de trajectoire arbitraires :
Pouvoir prédictif de la théorie de la force résistive
Ayant validé la théorie de la force résistive sur une jambe de robot tournée à travers un milieu granulaire (cinématique prescrite), nous avons ensuite testé son pouvoir prédictif sur un robot se déplaçant librement sur un milieu granulaire. Nous avons fait tourner un robot à pattes personnalisé sur un milieu granulaire avec une large gamme de fréquences de pas et de courbures de pattes. Comme nous l’avons précédemment, le robot se déplace plus rapidement avec des jambes de surface convexe orientées vers l’arrière que vers l’avant :
Nous avons ensuite développé une simulation dynamique multi-corps du robot, et utilisé la théorie des forces résistives pour calculer les forces de soulèvement et de traînée sur le corps et les jambes du robot par intégration des forces élémentaires. Nous avons constaté que la dynamique du mouvement prédite par la simulation en utilisant la théorie de la force résistive correspond bien à l’observation expérimentale :
La comparaison de l’expérience et de la simulation a montré que la théorie de la force résistive peut prédire avec précision et rapidement la locomotion des jambes sur des supports granulaires sur une large gamme de fréquence de foulée et de courbure de la jambe (Fig. 3).
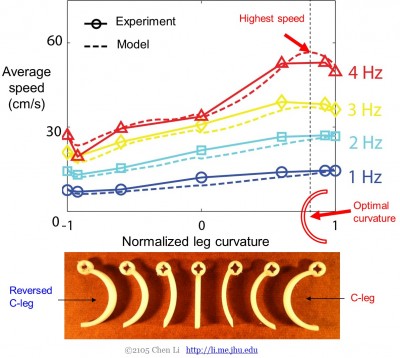
Figure 3. La théorie de la force résistive prédit le mouvement des robots à pattes sur des milieux granulaires.
Parce que notre théorie de la force résistive a permis la prédiction quantitative des forces et du mouvement dans les milieux granulaires de façon analogue à l’aéro et à l’hydrodynamique pour les fluides, nous avons établi la première terradynamique des sols fluides.
Généralité de la théorie de la force résistive
Nous avons effectué des mesures de la force résistive pour une diversité de milieux granulaires avec des particules de taille, de forme, de friction, de densité, de compaction et de polydispersité différentes. Nous avons découvert que la dépendance de la force à l’orientation et à la direction de l’intrus est étonnamment similaire (Fig. 4, gauche).
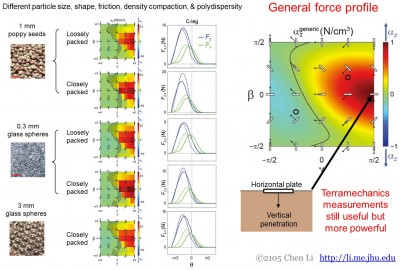
Figure 4. La généralité de la théorie de la force résistive pour une diversité de milieux granulaires et son avantage pratique.
Cela apporte un avantage pratique majeur. Comme ces milieux granulaires ont le même profil général de contrainte, une seule mesure de force pour déterminer la force verticale maximale suffit pour déduire les forces pour les autres orientations et directions sans avoir à toutes les mesurer (figure 4, à droite). Cela peut être fait simplement avec un pénétromètre du commerce. Cela signifie également que les mesures utilisant une plaque horizontale pénétrant vers le bas obtenues dans les études de terra-mécanique peuvent toujours être utilisées, mais de manière plus puissante en utilisant la théorie de la force résistive.
Enfin, grâce à son principe de superposition, notre théorie de la force résistive peut en principe s’appliquer à des animaux et des dispositifs de morphologie et de cinématique arbitraires (étant donné qu’ils fonctionnent dans les régimes de basse vitesse, non inertiel et continu). Par exemple, nous avons également découvert que la théorie utilisant des mesures de force résistive dans le plan horizontal peut prédire le mouvement du lézard des sables dans un milieu granulaire.
Pourquoi la terra-mécanique classique échoue pour les Rovers martiens
En terra-mécanique classique, parce que les grandes roues et les chenilles ont généralement une interface au sol qui est relativement plate et de niveau, les forces d’intrusion verticales dans les milieux granulaires sont caractérisées uniquement par le déplacement d’une plaque horizontale vers le bas (en utilisant un pénétromètre) (Fig. 5), mais pas sur un intrus dans d’autres directions et orientations. Ceci est ensuite utilisé pour prédire la portance, qui est ensuite équilibrée (statiquement et dynamiquement) avec le poids du véhicule pour prédire l’enfoncement.
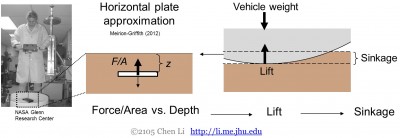
Figure 5. Approximation de plaque horizontale prévalant dans le développement des modèles classiques de terra-mécanique.
Cependant, pour les petites roues de rovers se déplaçant sur des milieux granulaires lâches (ou même des roues plus grandes enfoncées assez profondément), l’interface du sol devient fortement incurvée avec des orientations loin de l’horizontale. Comme nous l’avons montré avec nos mesures de force résistive qui tiennent compte de toutes les orientations et directions, une plaque horizontale subit généralement une force verticale beaucoup plus importante qu’une plaque loin de l’horizontale (Fig. 2, gauche). Par conséquent, l’approximation de la plaque horizontale ne s’applique plus, et les modèles classiques de terra-mécanique sur-prévoient substantiellement la force de soulèvement et sous-prévoient l’enfoncement.
Publications connexes:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (article invité) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand : subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (Featured in Nature News & Views) PDF
.