Inspiriert durch die Ähnlichkeit mit Schwimmern mit niedriger Reynoldszahl in Flüssigkeiten haben wir die erste Widerstandskraft-Theorie für körnige Medien entwickelt, um Kräfte und Bewegungen vorherzusagen. Die Schlüsselidee ist das Überlagerungsprinzip: Die Kräfte auf Körper und Beine mit komplexer Form, die sich in granularen Medien entlang einer beliebigen Bahn bewegen, können durch Überlagerung der Kräfte auf jedes ihrer Elemente gut angenähert werden (Abb. 1). Das Integrationsprinzip gilt für Schwimmer mit niedrigen Reynolds-Werten, da Trägheitseffekte vernachlässigbar sind und die Flüssigkeitsströmung um die Elemente lokal genug ist, dass die auf ein Element ausgeübte granulare Kraft unabhängig von der auf andere Elemente wirkenden Kraft ist. In Anbetracht dessen stellten wir die Hypothese auf, dass die Widerstandskrafttheorie auch für körnige Medien funktionieren würde.
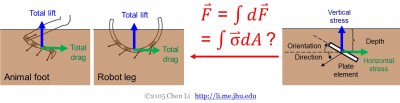
Abbildung 1. Überlagerungsprinzip der Widerstandskrafttheorie.
Widerstandskraftmessungen
Da Tiere und Roboter eine komplexe Morphologie und Kinematik haben, können sich die einzelnen Elemente ihrer Körper und Beine nicht nur in unterschiedlichen Tiefen befinden, sondern auch unterschiedliche Orientierungen und Bewegungsrichtungen haben (Abb. 1, links). Für Schwimmer in Flüssigkeiten mit niedriger Reynoldszahl lässt sich die Abhängigkeit der Kraft von der Ausrichtung und Richtung aus dem Stokes-Gesetz ableiten. Für granulare Medien wissen wir jedoch nicht, wie die Kraft von ihnen abhängt, da es keine solchen Gleichungen gibt. Daher verwendeten wir ein Plattenelement, um die ersten Messungen der Granulatkräfte als Funktion der Orientierung und Richtung des Eindringlings durchzuführen (Abb. 1, rechts).
Wir entdeckten, dass die Kraft (Spannung) sowohl von der Orientierung als auch von der Richtung empfindlich abhängt (Abb. 2, links). Die vertikale Kraft ist maximal, wenn ein Platteneindringling horizontal ausgerichtet ist und nach unten eindringt. Sobald die Ausrichtung von der Horizontalen und die Richtung von der Abwärtsrichtung abweicht, nimmt die vertikale Kraft schnell ab.
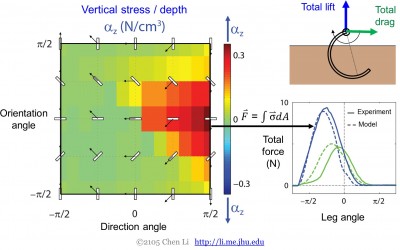
Abbildung 2. Messungen der Widerstandskraft und Validierung der Theorie. Der Einfachheit halber sind nur vertikale Widerstandskraftmessungen dargestellt.
Validierung der Widerstandskrafttheorie
Anhand unserer Messungen der körnigen Widerstandskraft haben wir die Spannungen über die Beinelemente integriert und festgestellt, dass die Widerstandskrafttheorie die Gesamtauftriebs- und -widerstandskräfte an einem Roboterbein, das sich durch körnige Medien bewegt, gut vorhersagen kann (Abb. 2, rechts). Dank des Superpositionsprinzips ist das Modell für Beine beliebiger Form und Flugbahn genau:
Vorhersagekraft der Widerstandskrafttheorie
Nachdem wir die Widerstandskrafttheorie an einem Roboterbein validiert hatten, das sich durch ein körniges Medium drehte (vorgeschriebene Kinematik), testeten wir als Nächstes ihre Vorhersagekraft an einem sich frei auf einem körnigen Medium bewegenden Roboter. Wir haben einen benutzerdefinierten Roboter mit Beinen auf körnigem Material mit einer großen Bandbreite an Schrittfrequenz und Beinkrümmung laufen lassen. Wie bereits erwähnt, bewegt sich der Roboter mit Beinen mit konvexer Oberfläche, die nach hinten gerichtet sind, schneller als mit Beinen, die nach vorne gerichtet sind:
Wir haben dann eine dynamische Mehrkörpersimulation des Roboters entwickelt und die Widerstandskrafttheorie verwendet, um die Auftriebs- und Widerstandskräfte auf den Roboterkörper und die Beine durch Integration der Elementarkräfte zu berechnen. Wir fanden heraus, dass die Bewegungsdynamik, die durch die Simulation unter Verwendung der Widerstandskrafttheorie vorhergesagt wurde, gut mit den experimentellen Beobachtungen übereinstimmt:
Der Vergleich von Experiment und Simulation zeigte, dass die Widerstandskrafttheorie die Fortbewegung von Beinen auf körnigen Medien über einen breiten Bereich von Schrittfrequenz und Beinkrümmung genau und schnell vorhersagen kann (Abb. 3).
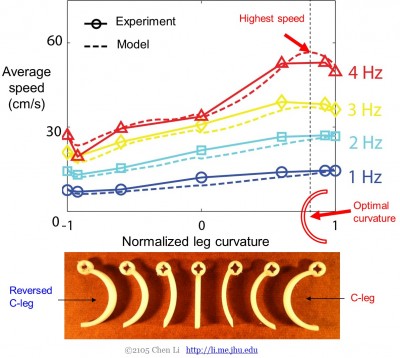
Abbildung 3. Die Widerstandskrafttheorie sagt die Bewegung eines beintragenden Roboters auf körnigen Medien voraus.
Da unsere Widerstandskrafttheorie die quantitative Vorhersage von Kräften und Bewegungen in körnigen Medien analog zur Aero- und Hydrodynamik für Flüssigkeiten ermöglicht, haben wir die erste Terradynamik für fließfähigen Boden aufgestellt.
Generalität der Widerstandskrafttheorie
Wir haben Widerstandskraftmessungen für eine Vielzahl von körnigen Medien mit unterschiedlicher Partikelgröße, Form, Reibung, Dichte, Verdichtung und Polydispersität durchgeführt. Wir stellten fest, dass die Abhängigkeit der Kraft von der Orientierung und Richtung des Eindringlings auffallend ähnlich ist (Abb. 4, links).
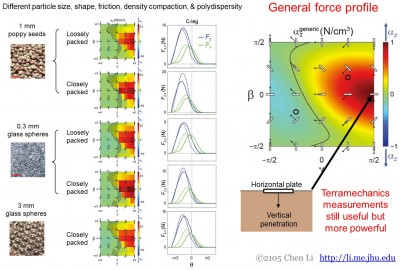
Abbildung 4. Die Allgemeingültigkeit der Widerstandskrafttheorie für eine Vielzahl von granularen Medien und ihr praktischer Nutzen.
Dies bietet einen großen praktischen Nutzen. Da diese körnigen Medien das gleiche allgemeine Spannungsprofil aufweisen, reicht eine einzige Kraftmessung zur Bestimmung der maximalen vertikalen Kraft aus, um auf die Kräfte für andere Orientierungen und Richtungen zu schließen, ohne alle messen zu müssen (Abb. 4, rechts). Dies kann einfach mit einem handelsüblichen Penetrometer durchgeführt werden. Das bedeutet auch, dass Messungen mit einer horizontalen Platte, die nach unten durchdringt, die in terramechanischen Studien gewonnen wurden, immer noch verwendet werden können, aber mit Hilfe der Widerstandskrafttheorie leistungsfähiger sind.
Schließlich kann unsere Widerstandskrafttheorie dank ihres Superpositionsprinzips prinzipiell auf Tiere und Geräte beliebiger Morphologie und Kinematik angewendet werden (vorausgesetzt, sie arbeiten im Niedriggeschwindigkeits-, Nicht-Inertial- und Kontinuumsregime). Wir haben zum Beispiel auch entdeckt, dass die Theorie unter Verwendung von Widerstandskraftmessungen in der horizontalen Ebene die Bewegung der Zauneidechse in körnigen Medien vorhersagen kann.
Warum die klassische Terramechanik bei Mars-Rovern versagt
Da große Räder und Raupen in der Regel eine relativ flache und ebene Bodenoberfläche haben, werden in der klassischen Terramechanik die vertikalen Intrusionskräfte in körnigen Medien nur durch die Bewegung einer horizontalen Platte nach unten (mit einem Penetrometer) charakterisiert (Abb. 5), nicht aber auf einen Eindringling in anderen Richtungen und Ausrichtungen. Dies wird dann zur Vorhersage des Auftriebs verwendet, der dann (statisch und dynamisch) mit dem Fahrzeuggewicht ausgeglichen wird, um das Sinken vorherzusagen.
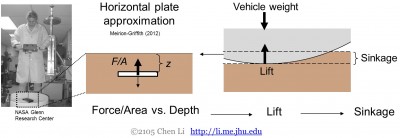
Abbildung 5. Horizontale Plattenannäherung, die bei der Entwicklung klassischer terra-mechanischer Modelle vorherrscht.
Bei kleinen Rädern von Rovern, die sich auf losem körnigem Material bewegen (oder sogar bei größeren Rädern, die tief genug eingesunken sind), wird die Bodenoberfläche jedoch stark gekrümmt und ist weit von der Horizontalen entfernt. Wie wir mit unseren Widerstandskraftmessungen gezeigt haben, die alle Ausrichtungen und Richtungen berücksichtigen, erfährt eine horizontale Platte im Allgemeinen eine viel größere vertikale Kraft als eine weit von der Horizontalen entfernte (Abb. 2, links). Infolgedessen gilt die Annäherung an eine horizontale Platte nicht mehr, und klassische terrestrische Modelle sagen die Auftriebskraft deutlich zu hoch und das Absinken zu niedrig voraus.
Verwandte Publikationen:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (Featured in Nature News & Views) PDF