Ispireret af ligheden med svømmere med lavt Reynoldstal i væsker skabte vi den første teori om modstandskraft for granulære medier for at forudsige kræfter og bevægelse. Nøgleidéen er superpositionsprincippet: Kræfterne på kroppe og ben af kompleks form, der bevæger sig i granulære medier langs en vilkårlig bane, kan tilnærmes godt ved en superposition af kræfter på hvert af deres elementer (fig. 1). Integrationsprincippet er gyldigt for svømmere med lav Reynoldsværdi, da inertialeffekterne er ubetydelige, og fordi væskestrømningen omkring elementerne er tilstrækkelig lokal til, at den granulære kraft, der udøves på et element, er uafhængig af den kraft, der udøves på andre elementer. I betragtning heraf antog vi, at teorien om resistiv kraft også ville fungere for granulære medier.
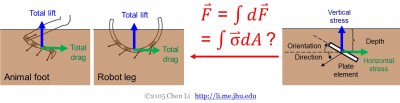
Figur 1. Superpositionsprincippet i teorien om resistive kræfter.
Resistive kraftmålinger
Da dyr og robotter har en kompleks morfologi og kinematik, kan hvert element i deres kroppe og ben ikke blot befinde sig i forskellige dybder, men også have forskellige orienteringer og bevægelsesretninger (fig. 1, venstre). For svømmere med lavt Reynoldstal i væsker kan det udledes af Stokes-loven, hvordan kraften afhænger af orientering og retning. Men for granulære medier ved vi ikke, hvordan kraften afhænger af dem, fordi der ikke findes sådanne ligninger. Derfor brugte vi et pladeelement til at foretage de første målinger af granulære kræfter som funktion af indtrængerens orientering og retning (fig. 1, højre).
Vi opdagede, at kraft (stress) afhænger følsomt af både orientering og retning (fig. 2, venstre). Den lodrette kraft er maksimal, når en pladeindtrænger er orienteret vandret og trænger nedad. Så snart orienteringen afviger fra den horisontale og retningen afviger fra den nedadgående, falder den vertikale kraft hurtigt.
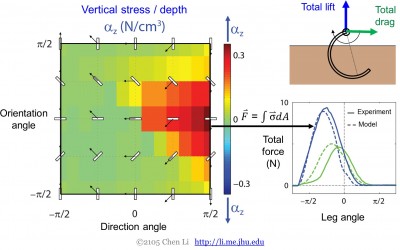
Figur 2. Målinger af modstandskraften og validering af teorien. Kun vertikale modstandskraftmålinger er vist for enkelhedens skyld.
Validering af teorien om modstandskraft
Ved hjælp af vores målinger af den granulære modstandskraft integrerede vi spændinger over benelementer og opdagede, at teorien om modstandskraft godt kan forudsige de samlede løfte- og modstandskræfter på et robotben, der bevæges gennem granulære medier (fig. 2, til højre). Takket være superpositionsprincippet er modellen nøjagtig for ben af vilkårlig form og bane:
Predictive Power of Resistive Force Theory
Efter at have valideret resistiv kraftteori på et robotben, der roteres gennem granulære medier (foreskrevet kinematik), testede vi næste gang dens forudsigelseskraft på en robot, der bevæger sig frit på granulære medier. Vi kørte en brugerdefineret robot med ben på granulære medier med et bredt spektrum af skridtfrekvens og benbøjning. Som vi tidligere har vist, bevæger robotten sig hurtigere med ben med konveks overflade bagudvendt end fremadvendt:
Vi udviklede derefter en dynamisk multikrops-simulering af robotten og brugte modstandskraftteori til at beregne løfte- og modstandskræfter på robotkroppen og -benene ved integration af elementære kræfter. Vi fandt, at den bevægelsesdynamik, der forudsiges ved simulering ved hjælp af resistiv kraftteori, stemmer godt overens med eksperimentel observation:
Sammenligning af eksperiment og simulering viste, at resistiv kraftteori nøjagtigt og hurtigt kan forudsige benbevægelse på granulære medier over et bredt område af skridtfrekvens og benkrumning (fig. 3).
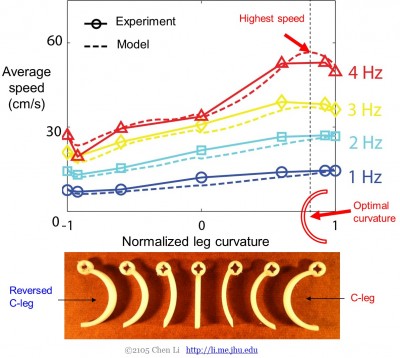
Figur 3. Resistiv kraftteori forudsiger benrobotbevægelse på granulære medier.
Da vores resistive kraftteori muliggjorde kvantitativ forudsigelse af kræfter og bevægelse i granulære medier analogt med aero- og hydrodynamik for væsker, har vi etableret den første terradynamik for flydende underlag.
Generalitet af teorien om resistive kræfter
Vi foretog resistive kraftmålinger for en mangfoldighed af granulære medier med forskellig partikelstørrelse, form, friktion, tæthed, komprimering og polydispersitet. Vi opdagede, at kraftens afhængighed af indtrængningsorientering og -retning er slående ens (fig. 4, venstre).
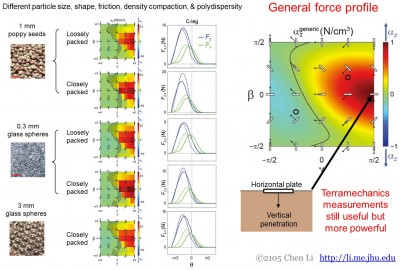
Figur 4. Genereliteten af teorien om modstandskraft for en mangfoldighed af granulære medier og dens praktiske fordel.
Dette giver en stor praktisk fordel. Da disse granulære medier har den samme generelle spændingsprofil, er kun en enkelt kraftmåling til bestemmelse af den maksimale vertikale kraft tilstrækkelig til at udlede kræfter for andre orienteringer og retninger uden at skulle måle dem alle (fig. 4, til højre). Dette kan ganske enkelt gøres med et standardpenetrometer. Det betyder også, at målinger med en horisontal plade, der trænger nedad, som er opnået i terramekaniske undersøgelser, stadig kan anvendes, men mere kraftfuldt ved hjælp af teorien om resistive kræfter.
Endeligt kan vores teori om resistive kræfter takket være dens superpositionsprincip i princippet anvendes på dyr og apparater af vilkårlig morfologi og kinematik (forudsat at de opererer i lavhastigheds-, ikke-inertial- og kontinuumregimer). Vi har f.eks. også opdaget, at teorien ved hjælp af målinger af modstandskraften i det horisontale plan kan forudsige sandfiskefirbenets bevægelse i et granulært medie.
Hvorfor den klassiske terramekanik fejler for Mars Rovers
I den klassiske terramekanik, fordi store hjul og spor normalt har en jordoverflade, der er relativt flad og jævn, karakteriseres vertikale indtrængningskræfter i granulære medier kun ved at flytte en horisontal plade nedad (ved hjælp af et penetrometer) (fig. 5), men ikke på en indtrænger i andre retninger og orienteringer. Dette bruges derefter til at forudsige løft, som derefter afbalanceres (statisk og dynamisk) med køretøjets vægt for at forudsige nedsynkning.
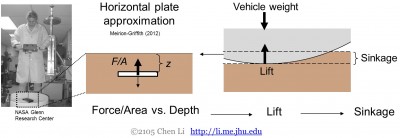
Figur 5. Tilnærmelse af horisontale plader, der er fremherskende i udviklingen af klassiske terramekaniske modeller.
For små hjul på rovere, der bevæger sig på løse granulære medier (eller endog større hjul, der er sunket dybt nok ned), bliver jordoverfladen imidlertid stærkt krum med orienteringer langt fra horisontale. Som vi har vist med vores modstandskraftmålinger, der tager højde for alle orienteringer og retninger, oplever en vandret plade generelt en meget større lodret kraft end en plade langt fra vandret (fig. 2, venstre). Som følge heraf gælder den horisontale pladeapproximation ikke længere, og klassiske terramekaniske modeller overforudsiger i væsentlig grad løftekraft og underforudsiger nedsynkning.
Relaterede publikationer:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (omtalt i Nature News Views) PDF