Inspirados por la similitud con los nadadores de bajo número de Reynolds en los fluidos, creamos la primera teoría de la fuerza resistiva para medios granulares para predecir las fuerzas y el movimiento. La idea clave es el principio de superposición: las fuerzas sobre cuerpos y patas de forma compleja que se mueven en medios granulares a lo largo de una trayectoria arbitraria pueden ser bien aproximadas por superposición de fuerzas sobre cada uno de sus elementos (Fig. 1). El principio de integración es válido para nadadores de bajo Reynolds porque, como los efectos inerciales son despreciables, el flujo de fluido alrededor de los elementos es lo suficientemente local como para que la fuerza granular ejercida sobre el elemento sea independiente de la ejercida sobre otros elementos. Teniendo en cuenta esto, planteamos la hipótesis de que la teoría de la fuerza resistiva también funcionaría para los medios granulares.
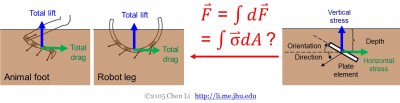
Figura 1. Principio de superposición de la teoría de la fuerza resistiva.
Mediciones de la fuerza resistiva
Debido a que los animales y los robots tienen una morfología y una cinemática complejas, cada elemento de sus cuerpos y piernas no sólo puede estar a diferentes profundidades, sino que también tiene diferentes orientaciones y direcciones de movimiento (Fig. 1, izquierda). Para nadadores con bajo número de Reynolds en fluidos, la forma en que la fuerza depende de la orientación y la dirección puede derivarse de la Ley de Stokes. Pero para los medios granulares, no sabemos cómo depende la fuerza porque no existen tales ecuaciones. Por lo tanto, utilizamos un elemento de placa para realizar las primeras mediciones de las fuerzas granulares en función de la orientación y dirección del intruso (Fig. 1, derecha).
Descubrimos que la fuerza (tensión) depende sensiblemente tanto de la orientación como de la dirección (Fig. 2, izquierda). La fuerza vertical es máxima cuando el intruso de la placa está orientado horizontalmente y penetra hacia abajo. Tan pronto como la orientación se desvía de la horizontal y la dirección se desvía hacia abajo, la fuerza vertical disminuye rápidamente.
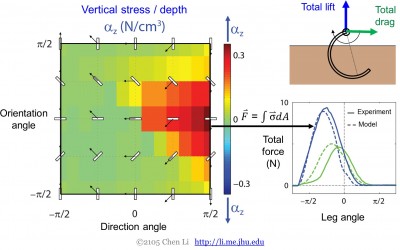
Figura 2. Mediciones de fuerza resistiva y validación de la teoría. Sólo se muestran las mediciones de la fuerza resistiva vertical para simplificar.
Validación de la teoría de la fuerza resistiva
Usando nuestras mediciones de la fuerza resistiva granular, integramos las tensiones sobre los elementos de la pata y descubrimos que la teoría de la fuerza resistiva puede predecir bien las fuerzas totales de elevación y arrastre en una pata de robot movida a través de medios granulares (Fig. 2, derecha). Gracias al principio de superposición, el modelo es preciso para piernas de forma y trayectoria arbitrarias:
Poder predictivo de la teoría de la fuerza resistiva
Habiendo validado la teoría de la fuerza resistiva en una pierna de robot girada a través de un medio granular (cinemática prescrita), probamos a continuación su poder predictivo en un robot que se mueve libremente en un medio granular. Hicimos funcionar un robot con patas personalizado sobre un medio granular con una amplia gama de frecuencia de zancada y curvatura de las piernas. Como ya dijimos, el robot se mueve más rápido con las patas de superficie convexa orientadas hacia atrás que hacia adelante:
Desarrollamos entonces una simulación dinámica multicuerpo del robot, y utilizamos la teoría de la fuerza resistiva para calcular las fuerzas de elevación y arrastre en el cuerpo y las patas del robot mediante la integración de las fuerzas elementales. Encontramos que la dinámica de movimiento predicha por la simulación utilizando la teoría de la fuerza resistiva coincide bien con la observación experimental:
La comparación del experimento y la simulación mostró que la teoría de la fuerza resistiva puede predecir con precisión y rapidez la locomoción de las piernas en medios granulares en un amplio rango de frecuencia de zancada y curvatura de las piernas (Fig. 3).
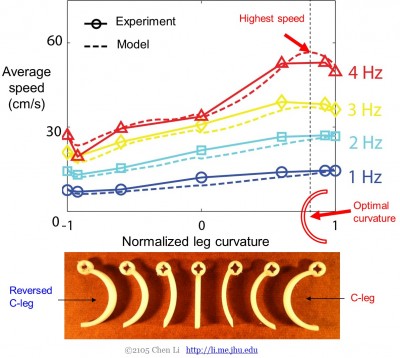
Figura 3. La teoría de la fuerza resistiva predice el movimiento del robot con patas en medios granulares.
Debido a que nuestra teoría de la fuerza resistiva permitió la predicción cuantitativa de las fuerzas y el movimiento en los medios granulares de forma análoga a la aerodinámica y la hidrodinámica para los fluidos, hemos establecido la primera terradinámica del suelo fluido.
Generalidad de la teoría de la fuerza resistiva
Hicimos mediciones de la fuerza resistiva para una diversidad de medios granulares con diferente tamaño de partícula, forma, fricción, densidad, compactación y polidispersidad. Descubrimos que la dependencia de la fuerza de la orientación y dirección del intruso es sorprendentemente similar (Fig. 4, izquierda).
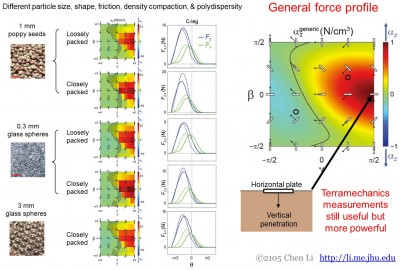
Figura 4. La generalidad de la teoría de la fuerza resistiva para una diversidad de medios granulares y su beneficio práctico.
Esto proporciona un importante beneficio práctico. Dado que estos medios granulares tienen el mismo perfil de tensión general, basta con una sola medición de la fuerza para determinar la fuerza vertical máxima para inferir las fuerzas para otras orientaciones y direcciones sin tener que medirlas todas (Fig. 4, derecha). Esto se puede hacer simplemente con un penetrómetro de uso corriente. Esto también significa que las mediciones con un penetrómetro de placa horizontal hacia abajo obtenidas en los estudios terramecánicos pueden seguir utilizándose, pero de forma más potente utilizando la teoría de la fuerza resistiva.
Por último, gracias a su principio de superposición, nuestra teoría de la fuerza resistiva puede aplicarse, en principio, a animales y dispositivos de morfología y cinemática arbitrarias (dado que operan en los regímenes de baja velocidad, no inercial y continuo). Por ejemplo, también descubrimos que la teoría que utiliza las mediciones de la fuerza resistiva en el plano horizontal puede predecir el movimiento del lagarto arenero dentro de medios granulares.
Por qué la terramecánica clásica falla para los exploradores de Marte
En la terramecánica clásica, debido a que las grandes ruedas y orugas suelen tener la interfaz del suelo relativamente plana y nivelada, las fuerzas de intrusión verticales en los medios granulares se caracterizan sólo al mover una placa horizontal hacia abajo (usando un penetrómetro) (Fig. 5), pero no en un intruso en otras direcciones y orientaciones. Esto se utiliza para predecir la elevación, que luego se equilibra (estática y dinámicamente) con el peso del vehículo para predecir el hundimiento.
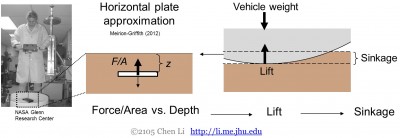
Figura 5. Aproximación de la placa horizontal que prevalece en el desarrollo de los modelos terramecánicos clásicos.
Sin embargo, para las pequeñas ruedas de los rovers que se mueven en medios granulares sueltos (o incluso para las ruedas más grandes hundidas a suficiente profundidad), la interfaz del suelo se vuelve muy curvada con orientaciones lejos de la horizontal. Como hemos demostrado con nuestras mediciones de fuerza resistiva que tienen en cuenta todas las orientaciones y direcciones, una placa horizontal generalmente experimenta una fuerza vertical mucho mayor que una alejada de la horizontal (Fig. 2, izquierda). Como resultado, la aproximación de la placa horizontal ya no se aplica, y los modelos terramecánicos clásicos sobre-predicen la fuerza de elevación y sub-predicen el hundimiento.
Publicaciones relacionadas:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Destacado en Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Artículo invitado) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (Destacado en Nature News & Views) PDF