Inspirerade av likheten med simmare med lågt Reynolds tal i vätskor skapade vi den första teorin om motståndskraft för granulära medier för att förutsäga krafter och rörelser. Nyckelidén är superpositionsprincipen: krafterna på kroppar och ben med komplexa former som rör sig i granulära medier längs en godtycklig bana kan approximeras väl genom en överlagring av krafterna på var och en av deras beståndsdelar (fig. 1). Integrationsprincipen är giltig för simmare med låga Reynoldsvärden, eftersom tröghetseffekterna är försumbara och vätskeflödet runt elementen är tillräckligt lokalt för att den granulära kraft som utövas på elementet är oberoende av den som utövas på andra element. Med tanke på detta antog vi att teorin om resistiv kraft också skulle fungera för granulära medier.
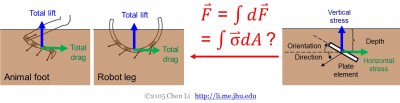
Figur 1. Superpositionsprincipen för teorin om resistiv kraft.
Mätningar av resistiv kraft
Då djur och robotar har en komplex morfologi och kinematik kan varje element i deras kroppar och ben inte bara befinna sig på olika djup, utan också ha olika orienteringar och rörelseriktningar (fig. 1, vänster). För simmare med lågt Reynoldsnummer i vätskor kan hur kraften beror på orientering och riktning härledas från Stokeslagen. Men för granulära medier vet vi inte hur kraften beror på dem eftersom det inte finns några sådana ekvationer. Därför använde vi ett plattelement för att göra de första mätningarna av granulära krafter som en funktion av inträngarens orientering och riktning (fig. 1, höger).
Vi upptäckte att kraften (spänningen) beror känsligt på både orientering och riktning (fig. 2, vänster). Den vertikala kraften är maximal när en plattinträngare är orienterad horisontellt och penetrerar nedåt. Så snart orienteringen avviker från horisontell och riktningen avviker från nedåt minskar den vertikala kraften snabbt.
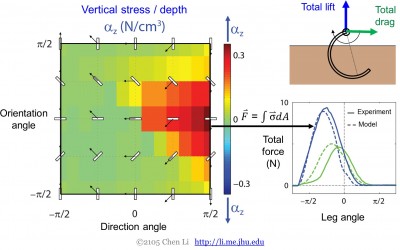
Figur 2. Mätningar av motståndskraften och validering av teorin. Endast vertikala resistiva kraftmätningar visas för enkelhetens skull.
Validering av teorin om resistiva krafter
Med hjälp av våra mätningar av resistiva krafter i granulärt material integrerade vi spänningar över benets element och upptäckte att teorin om resistiva krafter kan förutsäga de totala lyft- och dragkrafterna på ett robotben som förflyttas genom granulärt material på ett bra sätt (fig. 2, höger). Tack vare superpositionsprincipen är modellen exakt för ben med godtycklig form och bana.
Predictive Power of Resistive Force Theory
När vi hade validerat teorin om resistiva krafter på ett robotben som roterades genom granulära medier (föreskriven kinematik) testade vi nästa gång dess förutsägelseförmåga på en robot som rörde sig fritt på granulära medier. Vi körde en skräddarsydd robot med ben på granulära medier med ett brett spektrum av stegfrekvens och benkrökning. Som vi tidigare har konstaterat rör sig roboten snabbare med benen med den konvexa ytan riktad bakåt än framåt:
Vi utvecklade sedan en dynamisk simulering av roboten med flera kroppar och använde resistiv kraftteori för att beräkna lyft- och dragkrafter på robotkroppen och robotbenen genom integrering av elementära krafter. Vi fann att den rörelsedynamik som förutsägs genom simulering med hjälp av resistiv kraftteori stämmer väl överens med experimentella observationer:
Sammanjämningen av experiment och simulering visade att resistiv kraftteori exakt och snabbt kan förutsäga rörelse med ben på granulära medier över ett brett område av stegfrekvens och benkrökning (fig. 3).
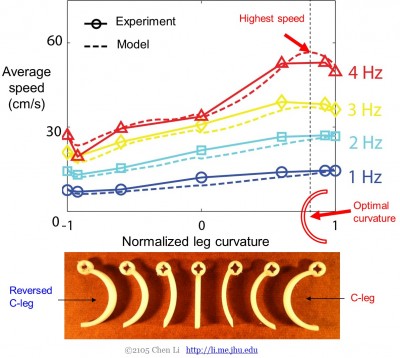
Figur 3. Resistive force theory predicts legged robot movement on granular media.
Då vår resistive force theory möjliggjorde kvantitativ prediktion av krafter och rörelse i granulära medier analogt med aero- och hydrodynamik för vätskor, har vi etablerat den första terradynamiken för flödande mark.
Generalitet hos teorin om resistiv kraft
Vi gjorde resistiva kraftmätningar för en mångfald av granulära medier med olika partikelstorlek, form, friktion, densitet, kompaktering och polydispersitet. Vi upptäckte att kraftens beroende av inträngarnas orientering och riktning är slående likartad (figur 4, vänster).
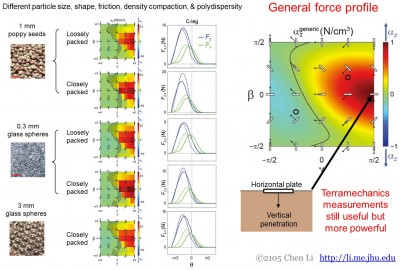
Figur 4. Resistivkraftsteorins generalitet för en mångfald av granulära medier och dess praktiska nytta.
Detta ger en stor praktisk nytta. Eftersom dessa granulära medier har samma allmänna spänningsprofil räcker det med en enda kraftmätning för att bestämma den maximala vertikala kraften för att härleda krafter för andra orienteringar och riktningar utan att behöva mäta dem alla (fig. 4, höger). Detta kan enkelt göras med en vanlig penetrometer. Detta innebär också att mätningar med hjälp av en horisontell platta som penetrerar nedåt som erhållits i terramekaniska studier fortfarande kan användas, men på ett mer kraftfullt sätt med hjälp av teorin om resistiva krafter.
Slutligt kan vår teori om resistiva krafter, tack vare dess superpositionsprincip, i princip tillämpas på djur och anordningar med godtycklig morfologi och kinematik (förutsatt att de verkar i låghastighets-, icke-inertial- och kontinuitetsregimerna). Vi upptäckte till exempel också att teorin med hjälp av resistiva kraftmätningar i det horisontella planet kan förutsäga sandödlans rörelse i granulära medier.
Varför den klassiska terramekaniken misslyckas för Marsrovers
I den klassiska terramekaniken, eftersom stora hjul och spår vanligen har markytor som är relativt plana och jämna, karakteriseras vertikala intrångskrafter i granulära medier endast genom att en horisontell platta förflyttas nedåt (med hjälp av en penetrometer) (Fig. 5), men inte på en inträngare i andra riktningar och orienteringar. Detta används sedan för att förutsäga lyft, som sedan balanseras (statiskt och dynamiskt) med fordonets vikt för att förutsäga sänkning.
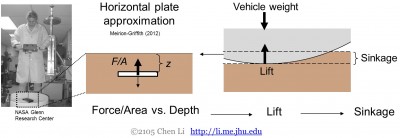
Figur 5. Horisontell plattans approximation som är vanlig vid utvecklingen av klassiska terramekaniska modeller.
För små hjul på rovers som rör sig på lösa granulära medier (eller till och med större hjul som är tillräckligt djupt nedsänkta) blir dock markgränssnittet starkt krökt med orienteringar långt ifrån horisontella. Som vi har visat med våra resistiva kraftmätningar som tar hänsyn till alla orienteringar och riktningar, upplever en horisontell platta i allmänhet en mycket större vertikal kraft än en platta som är långt ifrån horisontell (fig. 2, vänster). Som ett resultat av detta gäller inte längre approximationen av den horisontella plattan, och klassiska terramekaniska modeller överförutsäger i hög grad lyftkraften och underförutsäger nedsänkningen.
Relaterade publikationer:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (presenterad i Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Inbjudet papper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (presenterad i Nature News & Visningar) PDF