Inspirați de asemănarea cu înotătorii cu număr de Reynolds mic în fluide, am creat prima teorie a forțelor rezistive pentru mediile granulare pentru a prezice forțele și mișcarea. Ideea cheie este principiul de suprapunere: forțele asupra corpurilor și picioarelor de formă complexă care se deplasează în medii granulare de-a lungul unei traiectorii arbitrare pot fi bine aproximate prin suprapunerea forțelor pe fiecare dintre elementele lor (Fig. 1). Principiul de integrare este valabil pentru înotătorii cu un coeficient Reynolds scăzut, deoarece, întrucât efectele inerțiale sunt neglijabile, curgerea fluidelor în jurul elementelor este suficient de locală pentru ca forța granulară exercitată asupra elementului să fie independentă de cea exercitată asupra altor elemente. Având în vedere acest lucru, am emis ipoteza că teoria forței rezistive ar funcționa și pentru mediile granulare.
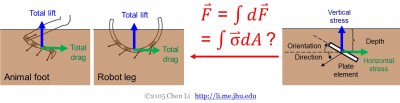
Figura 1. Principiul de suprapunere al teoriei forței rezistive.
Măsurători ale forței rezistive
Pentru că animalele și roboții au o morfologie și o cinematică complexe, fiecare element al corpului și al picioarelor lor nu numai că se poate afla la adâncimi diferite, dar poate avea și orientări și direcții de mișcare diferite (Fig. 1, stânga). Pentru înotătorii cu număr Reynolds scăzut în fluide, modul în care forța depinde de orientare și direcție poate fi derivat din legea Stokes. Dar pentru mediile granulare, nu știm cum depinde forța de acestea, deoarece nu există astfel de ecuații. Prin urmare, am folosit un element de placă pentru a face primele măsurători ale forțelor granulare în funcție de orientarea și direcția intrusului (Fig. 1, dreapta).
Am descoperit că forța (tensiunea) depinde în mod sensibil atât de orientare cât și de direcție (Fig. 2, stânga). Forța verticală este maximă atunci când un intrus al plăcii este orientat orizontal și pătrunde în jos. De îndată ce orientarea deviază de la orizontală și direcția deviază de la descendentă, forța verticală scade rapid.
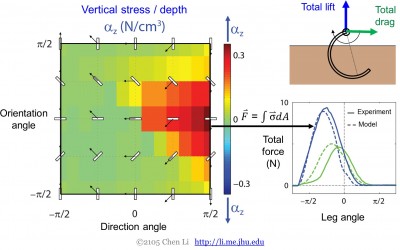
Figura 2. Măsurătorile forței rezistive și validarea teoriei. Pentru simplitate, sunt prezentate doar măsurătorile forței rezistive verticale.
Validarea teoriei forței rezistive
Utilizând măsurătorile noastre de forță rezistivă granulară, am integrat tensiunile asupra elementelor piciorului și am descoperit că teoria forței rezistive poate prezice bine forțele totale de ridicare și de rezistență pe un picior de robot deplasat prin medii granulare (Fig. 2, dreapta). Datorită principiului de suprapunere, modelul este precis pentru picioare de formă și traiectorie arbitrare:
Puterea predictivă a teoriei forței rezistive
După ce am validat teoria forței rezistive pe un picior de robot rotit prin medii granulare (cinematică prescrisă), am testat în continuare puterea sa predictivă pe un robot care se deplasează liber pe medii granulare. Am rulat un robot cu picior personalizat pe medii granulare cu o gamă largă de frecvențe de pas și de curbură a piciorului. După cum am arătat anterior, robotul se deplasează mai repede cu picioarele de suprafață convexă orientate spre spate decât spre înainte:
Apoi am dezvoltat o simulare dinamică multicorp a robotului și am folosit teoria forțelor rezistive pentru a calcula forțele de ridicare și de rezistență pe corpul și picioarele robotului prin integrarea forțelor elementare. Am constatat că dinamica mișcării prezisă prin simulare folosind teoria forțelor rezistive se potrivește bine cu observația experimentală:
Compararea experimentului și a simulării a arătat că teoria forțelor rezistive poate prezice cu precizie și rapid locomoția cu picioarele pe medii granulare pe o gamă largă de frecvențe de pas și de curbură a picioarelor (Fig. 3).
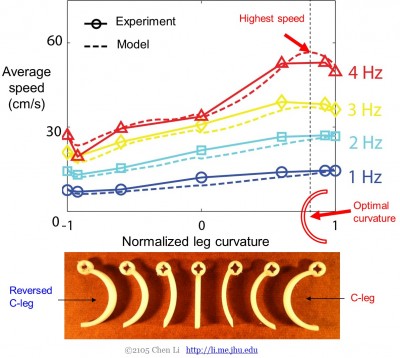
Figura 3. Teoria forțelor rezistive prezice deplasarea roboților cu picioare pe medii granulare.
Pentru că teoria noastră a forțelor rezistive a permis o predicție cantitativă a forțelor și a mișcării în medii granulare, analogă cu aero și hidrodinamica pentru fluide, am stabilit prima termodinamică a terenului fluidizabil.
Generalitatea teoriei forței rezistive
Am efectuat măsurători ale forței rezistive pentru o diversitate de medii granulare cu diferite dimensiuni ale particulelor, formă, frecare, densitate, compactare și polidispersitate. Am descoperit că dependența forței de orientarea și direcția intrusului este izbitor de asemănătoare (Fig. 4, stânga).
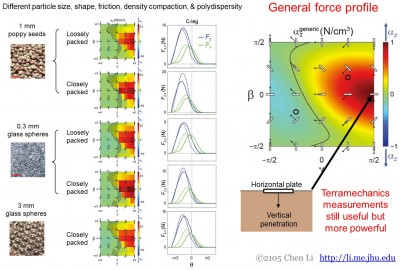
Figura 4. Generalitatea teoriei forței rezistive pentru o diversitate de medii granulare și beneficiul său practic.
Aceasta oferă un beneficiu practic major. Deoarece aceste medii granulare au același profil general de tensiune, o singură măsurare a forței pentru a determina forța verticală maximă este suficientă pentru a deduce forțele pentru alte orientări și direcții fără a fi nevoie să le măsurăm pe toate (Fig. 4, dreapta). Acest lucru poate fi realizat simplu cu un penetrometru din comerț. Acest lucru înseamnă, de asemenea, că măsurătorile cu ajutorul unui penetrometru cu placă orizontală care penetrează în jos, obținute în studiile teramecanice, pot fi folosite în continuare, dar mai puternic, folosind teoria forței rezistive.
În cele din urmă, datorită principiului de suprapunere, teoria noastră a forței rezistive se poate aplica, în principiu, animalelor și dispozitivelor de morfologie și cinematică arbitrare (având în vedere că acestea funcționează în regimuri de viteză redusă, non-inerțiale și de continuitate). De exemplu, am descoperit, de asemenea, că teoria care utilizează măsurători ale forței rezistive în plan orizontal poate prezice mișcarea șopârlei sandfish în medii granulare.
De ce eșuează terramecanica clasică pentru roverele de pe Marte
În terramecanica clasică, deoarece roțile și șenilele mari au de obicei o interfață cu solul care este relativ plană și nivelată, forțele de intruziune verticală în medii granulare sunt caracterizate doar prin deplasarea unei plăci orizontale în jos (folosind un penetrometru) (Fig. 5), dar nu și pe un intrus în alte direcții și orientări. Acest lucru este apoi folosit pentru a prezice ridicarea, care este apoi echilibrată (static și dinamic) cu greutatea vehiculului pentru a prezice scufundarea.
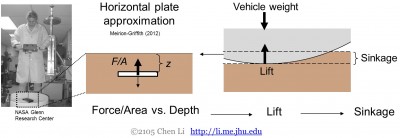
Figura 5. Aproximarea plăcii orizontale predominantă în dezvoltarea modelelor terramecanice clasice.
Dar, pentru roțile mici ale roverelor care se deplasează pe medii granulare libere (sau chiar roți mai mari scufundate suficient de adânc), interfața solului devine foarte curbată, cu orientări departe de orizontală. După cum am arătat cu măsurătorile noastre de forță rezistivă care iau în considerare toate orientările și direcțiile, o placă orizontală suferă, în general, o forță verticală mult mai mare decât una departe de orizontală (Fig. 2, stânga). Ca urmare, aproximația plăcii orizontale nu se mai aplică, iar modelele terramecanice clasice supra-prezintă în mod substanțial forța de ridicare și sub-prezintă scufundarea.
Publicații înrudite:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Înotând în deșert, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (Featured in Nature News & Views) PDF
.