Inspirado pela similaridade com nadadores de baixo número de Reynolds em fluidos, criamos a primeira teoria da força resistiva para meios granulares para prever forças e movimentos. A idéia chave é o princípio da sobreposição: as forças sobre corpos e pernas de forma complexa movendo-se em meios granulares ao longo de trajetórias arbitrárias podem ser bem aproximadas pela sobreposição de forças sobre cada um de seus elementos (Fig. 1). O princípio da integração é válido para nadadores de baixo Reynolds porque, como os efeitos de inércia são insignificantes, o fluxo de fluido em torno dos elementos é suficientemente local para que a força granular exercida sobre o elemento seja independente da exercida sobre os outros elementos. Considerando isto, colocamos a hipótese de que a teoria da força resistiva também funcionaria para meios granulares.
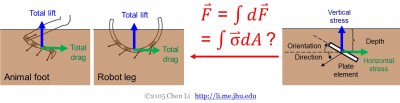
Figure 1. Princípio da superposição da teoria da força resistiva.
Medições de força resistiva
Porque animais e robôs têm morfologia e cinemática complexas, cada elemento de seus corpos e pernas pode não só estar em diferentes profundidades, mas também ter diferentes orientações e direções de movimento (Fig. 1, à esquerda). Para nadadores de baixo número de Reynolds em fluidos, como a força depende da orientação e direção pode ser derivada da Lei de Stokes. Mas para os meios granulares, não sabemos como a força depende deles, porque não existem tais equações. Portanto, usamos um elemento de placa para fazer as primeiras medições de forças granulares em função da orientação e direção do intruso (Fig. 1, à direita).
Descobrimos que a força (tensão) depende sensivelmente tanto da orientação quanto da direção (Fig. 2, à esquerda). A força vertical é máxima quando um intruso de placa é orientado horizontalmente e penetra para baixo. Assim que a orientação se desviar da horizontal e a direção se desviar da para baixo, a força vertical diminui rapidamente.
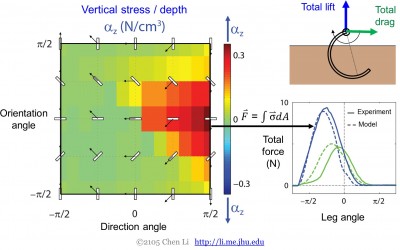
Figure 2. Medidas de força resistiva e validação da teoria. Apenas medições de força resistiva vertical são mostradas para simplificar.
Validação da Teoria da Força Resistiva
Usando nossas medições de força resistiva granular, integramos tensões sobre os elementos da perna e descobrimos que a teoria da força resistiva pode prever bem as forças totais de elevação e arrasto em uma perna de robô movida através de meios granulares (Fig. 2, à direita). Graças ao princípio da sobreposição, o modelo é preciso para pernas de forma e trajetória arbitrárias:
Potência Preditiva da Teoria da Força Resistiva
A teoria da força resistiva validada em uma perna de robô girada através de meios granulares (cinemática prescrita), nós testamos a seguir sua força preditiva em um robô movendo-se livremente sobre meios granulares. Nós executamos um robô com pernas personalizadas em meios granulares com uma ampla gama de frequência de passos e curvatura da perna. Como fizemos anteriormente, o robô move-se mais rápido com pernas de superfície convexa voltadas para trás do que para a frente:
Desenvolvemos então uma simulação dinâmica de vários corpos do robô, e usamos a teoria da força resistiva para calcular as forças de elevação e arrasto no corpo e pernas do robô através da integração de forças elementares. Descobrimos que a dinâmica do movimento prevista pela simulação usando a teoria da força resistiva combina bem com a observação experimental:
Comparação da experiência e simulação mostrou que a teoria da força resistiva pode prever com precisão e rapidamente a locomoção de pernas em meios granulares numa ampla gama de frequência de passos e curvatura das pernas (Fig. 3).
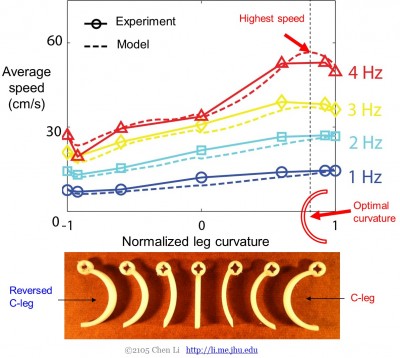
Figura 3. A teoria da força resistiva prevê o movimento do robô com pernas em meios granulares.
Porque nossa teoria da força resistiva permitiu a previsão quantitativa de forças e movimento em meios granulares análogos à aero- e hidrodinâmica para fluidos, estabelecemos a primeira terradinâmica de solo fluível.
Generalidade da Teoria da Força Resistiva
Fizemos medições de força resistiva para uma diversidade de meios granulares com diferentes tamanhos de partículas, forma, atrito, densidade, compactação e polidispersidade. Descobrimos que a dependência da força da orientação e direção do intruso é surpreendentemente semelhante (Fig. 4, esquerda).
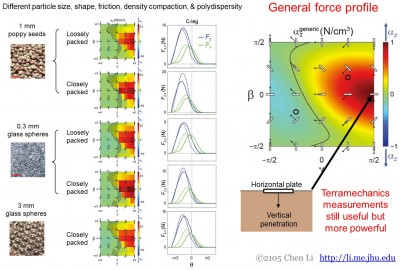
Figure 4. A generalidade da teoria da força resistiva para uma diversidade de meios granulares e seu benefício prático.
Esta teoria proporciona um grande benefício prático. Como estes meios granulares têm o mesmo perfil geral de tensão, apenas uma única medição de força para determinar a força vertical máxima é suficiente para inferir forças para outras orientações e direções sem ter que medir todas elas (Fig. 4, à direita). Isto pode ser feito simplesmente com um penetrômetro fora da prateleira. Isto também significa que medições usando uma placa horizontal penetrando para baixo obtida em estudos terramecânicos ainda podem ser usadas, mas mais poderosamente usando a teoria da força resistiva.
Finalmente, graças ao seu princípio de sobreposição, nossa teoria da força resistiva pode, em princípio, ser aplicada a animais e dispositivos de morfologia e cinemática arbitrárias (dado que operam em regimes de baixa velocidade, não-inerciais e contínuos). Por exemplo, também descobrimos que a teoria que utiliza medidas de força resistiva no plano horizontal pode prever o movimento do lagarto de peixe-aranha dentro do meio granular.
Por que a Terramecânica Clássica Falha para Mars Rovers
Na terramecânica clássica, porque as grandes rodas e os trilhos têm geralmente uma interface terrestre relativamente plana e nivelada, as forças de intrusão vertical em meios granulares são caracterizadas apenas pelo movimento de uma placa horizontal para baixo (usando um penetrômetro) (Fig. 5), mas não sobre um intruso em outras direções e orientações. Isto é então usado para prever a elevação, que é então equilibrada (estática e dinamicamente) com o peso do veículo para prever a queda.
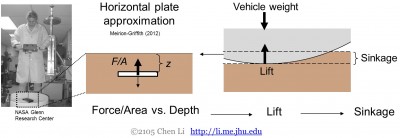
Figure 5. Aproximação da placa horizontal prevalecente no desenvolvimento dos modelos clássicos terrestres.
No entanto, para pequenas rodas de rovers que se movimentam em meios granulares soltos (ou mesmo rodas maiores afundadas suficientemente fundo), a interface do solo torna-se altamente curva com orientações longe da horizontal. Como temos mostrado com nossas medidas de força resistiva que levam em conta todas as orientações e direções, uma placa horizontal geralmente experimenta uma força vertical muito maior do que uma longe da horizontal (Fig. 2, à esquerda). Como resultado, a aproximação da placa horizontal não se aplica mais, e os modelos terrestres clássicos superprevêem substancialmente a força de elevação e subprevêem o afundamento.
Publicações relacionadas:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Nadando no deserto, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Natação ondulatória na areia: locomoção subsuperficial do lagarto do peixe-santo, Science, 325, 314-318 (Destaque em Nature News & Views) PDF