Zainspirowani podobieństwem do pływaków o niskiej liczbie Reynoldsa w cieczach, stworzyliśmy pierwszą teorię sił oporowych dla mediów ziarnistych w celu przewidywania sił i ruchu. Kluczową ideą jest zasada superpozycji: siły działające na ciała i nogi o złożonym kształcie poruszające się w mediach ziarnistych po dowolnej trajektorii mogą być dobrze przybliżone przez superpozycję sił działających na każdy z ich elementów (Rys. 1). Zasada integracji jest słuszna dla pływaków o małej liczbie Reynoldsa, ponieważ, jako że efekty inercyjne są pomijalne, przepływ płynu wokół elementów jest na tyle lokalny, że siła granulometryczna wywierana na element jest niezależna od siły wywieranej na inne elementy. Biorąc to pod uwagę, postawiliśmy hipotezę, że teoria sił oporowych będzie również działać dla mediów ziarnistych.
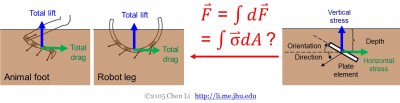
Rysunek 1. Zasada superpozycji teorii sił oporowych.
Pomiary sił oporowych
Ponieważ zwierzęta i roboty mają złożoną morfologię i kinematykę, każdy element ich ciała i nóg może nie tylko znajdować się na różnych głębokościach, ale także mieć różne orientacje i kierunki ruchu (Rys. 1, po lewej). Dla pływaków w płynach o niskiej liczbie Reynoldsa, zależność siły od orientacji i kierunku można wyprowadzić z prawa Stokesa. Jednak dla ośrodków ziarnistych nie wiemy jak siła zależy od nich, ponieważ nie istnieją takie równania. Dlatego też, użyliśmy elementu płytowego do wykonania pierwszych pomiarów sił granulometrycznych jako funkcji orientacji i kierunku intruza (Rys. 1, po prawej).
Odkryliśmy, że siła (naprężenie) zależy wrażliwie zarówno od orientacji jak i kierunku (Rys. 2, po lewej). Siła pionowa jest maksymalna, gdy intruz płytki jest zorientowany poziomo i penetruje w dół. Jak tylko orientacja odchyla się od poziomej i kierunek odchyla się od dołu, siła pionowa szybko maleje.
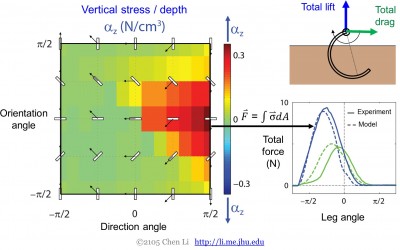
Rysunek 2. Pomiary siły oporowej i walidacja teorii. Dla uproszczenia pokazano tylko pomiary pionowej siły oporu.
Weryfikacja teorii siły oporu
Korzystając z naszych pomiarów siły oporu granulatu, zintegrowaliśmy naprężenia na elementach nogi i odkryliśmy, że teoria siły oporu może dobrze przewidzieć całkowite siły unoszenia i oporu nogi robota poruszającego się przez media granulowane (Rys. 2, po prawej). Dzięki zasadzie superpozycji, model jest dokładny dla nóg o dowolnym kształcie i trajektorii:
Predictive Power of Resistive Force Theory
Po zwalidowaniu teorii sił oporowych na nodze robota obracanej przez granulowane media (kinematyka przepisowa), sprawdziliśmy następnie jej moc predykcyjną na robocie swobodnie poruszającym się po granulowanym podłożu. Uruchomiliśmy niestandardowego robota na nogach na granulowanym podłożu z szerokim zakresem częstotliwości kroku i krzywizny nogi. Jak już wcześniej zauważyliśmy, robot porusza się szybciej z nogami o wypukłej powierzchni skierowanymi do tyłu niż do przodu:
Następnie stworzyliśmy symulację dynamiczną robota dla wielu ciał i wykorzystaliśmy teorię sił oporu do obliczenia sił nośnych i oporu na ciele i nogach robota poprzez integrację sił elementarnych. Stwierdziliśmy, że dynamika ruchu przewidywana przez symulację z wykorzystaniem teorii sił oporowych dobrze pasuje do obserwacji eksperymentalnych:
Porównanie eksperymentu i symulacji wykazało, że teoria sił oporowych może dokładnie i szybko przewidzieć lokomocję nóg na ziarnistym podłożu w szerokim zakresie częstotliwości kroku i krzywizny nóg (Rys. 3).
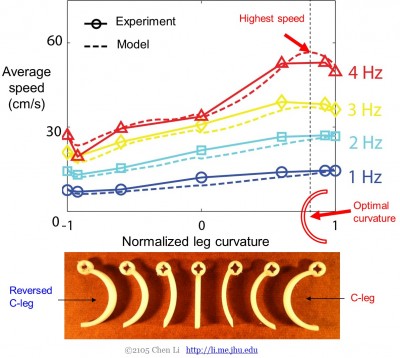
Rysunek 3. Teoria sił oporowych przewiduje ruch robota na granulowanym podłożu.
Ponieważ nasza teoria sił oporowych umożliwiła ilościowe przewidywanie sił i ruchu w granulowanym podłożu analogicznie do aero- i hydrodynamiki dla płynów, stworzyliśmy pierwszą terradynamikę płynnego podłoża.
Generalność teorii sił oporowych
Wykonaliśmy pomiary sił oporowych dla różnorodnych mediów ziarnistych o różnych rozmiarach cząstek, kształcie, tarciu, gęstości, zagęszczeniu i polidyspersyjności. Odkryliśmy, że zależność siły od orientacji i kierunku intruza jest uderzająco podobna (Rys. 4, po lewej).
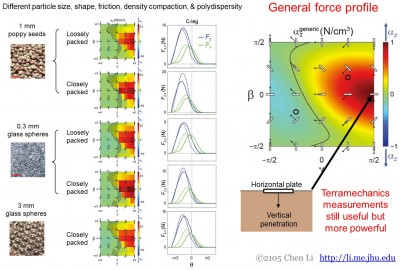
Rysunek 4. Ogólność teorii siły oporu dla różnorodnych mediów ziarnistych i jej praktyczne korzyści.
Daje to duże korzyści praktyczne. Ponieważ te media ziarniste mają ten sam ogólny profil naprężenia, tylko jeden pomiar siły w celu określenia maksymalnej siły pionowej jest wystarczający do wnioskowania o siłach dla innych orientacji i kierunków bez konieczności mierzenia ich wszystkich (Rys. 4, po prawej). Można to w prosty sposób wykonać za pomocą penetrometru dostępnego na rynku. Oznacza to również, że pomiary z użyciem poziomej płyty penetrującej w dół uzyskane w badaniach terramechanicznych mogą być nadal wykorzystywane, ale z większą mocą przy użyciu teorii sił oporowych.
Wreszcie, dzięki zasadzie superpozycji, nasza teoria sił oporowych może w zasadzie stosować się do zwierząt i urządzeń o dowolnej morfologii i kinematyce (biorąc pod uwagę, że działają one w reżimie małych prędkości, nieinercjalnym i continuum). Na przykład, odkryliśmy również, że teoria wykorzystująca pomiary siły oporu w płaszczyźnie poziomej może przewidzieć ruch jaszczurki piaskowej w mediach ziarnistych.
Why Classical Terramechanics Fails for Mars Rovers
W klasycznej terramechanice, ponieważ duże koła i gąsienice zwykle mają interfejs podłoża, który jest stosunkowo płaski i równy, pionowe siły intruzji w mediach ziarnistych są charakteryzowane tylko przez przesuwanie poziomej płyty w dół (przy użyciu penetrometru) (Rys. 5), ale nie na intruzie w innych kierunkach i orientacjach. Jest to następnie wykorzystywane do przewidywania unoszenia, które jest następnie równoważone (statycznie i dynamicznie) z masą pojazdu w celu przewidywania zatonięcia.
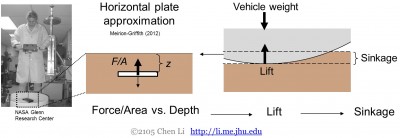
Rysunek 5. Przybliżenie płyty poziomej dominujące w rozwoju klasycznych modeli terramechanicznych.
Jednakże, dla małych kół łazików poruszających się po luźnych ziarnistych mediach (lub nawet większych kół zatopionych wystarczająco głęboko), interfejs gruntowy staje się wysoce zakrzywiony z orientacjami dalekimi od poziomych. Jak pokazaliśmy w naszych pomiarach siły oporu, które uwzględniają wszystkie orientacje i kierunki, pozioma płyta generalnie doświadcza znacznie większej siły pionowej niż ta oddalona od poziomu (Rys. 2, po lewej). W rezultacie, przybliżenie płyty poziomej nie ma już zastosowania, a klasyczne modele terramechaniczne znacznie zawyżają przewidywania siły nośnej i zaniżają przewidywania zatopienia.
Publikacje powiązane:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Swimming in the desert, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Undulatory swimming in sand: subsurface locomotion of the sandfish lizard, Science, 325, 314-318 (Featured in Nature News & Views) PDF
.