Ispirati dalla somiglianza con i nuotatori a basso numero di Reynolds nei fluidi, abbiamo creato la prima teoria delle forze resistive per i mezzi granulari per prevedere forze e movimento. L’idea chiave è il principio di sovrapposizione: le forze su corpi e gambe di forma complessa che si muovono in mezzi granulari lungo una traiettoria arbitraria possono essere ben approssimate dalla sovrapposizione delle forze su ciascuno dei loro elementi (Fig. 1). Il principio di integrazione è valido per i nuotatori a basso Reynolds perché, essendo trascurabili gli effetti inerziali, il flusso del fluido intorno agli elementi è abbastanza locale che la forza granulare esercitata sull’elemento è indipendente da quella sugli altri elementi. Considerando questo, abbiamo ipotizzato che la teoria della forza resistiva funzionerebbe anche per i mezzi granulari.
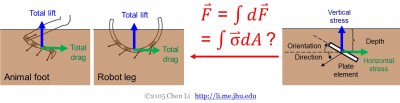
Figura 1. Principio di sovrapposizione della teoria della forza resistiva.
Misurazioni della forza resistiva
Perché gli animali e i robot hanno una morfologia e una cinematica complesse, ogni elemento dei loro corpi e delle loro gambe non solo può essere a profondità diverse, ma anche avere orientamenti e direzioni di movimento diversi (Fig. 1, a sinistra). Per i nuotatori a basso numero di Reynolds nei fluidi, come la forza dipende dall’orientamento e dalla direzione può essere derivata dalla legge di Stokes. Ma per i mezzi granulari, non sappiamo come la forza dipende da loro perché non esistono tali equazioni. Perciò, abbiamo usato un elemento piatto per fare le prime misure delle forze granulari in funzione dell’orientamento e della direzione dell’intruso (Fig. 1, a destra).
Abbiamo scoperto che la forza (stress) dipende sensibilmente sia dall’orientamento che dalla direzione (Fig. 2, a sinistra). La forza verticale è massima quando una piastra intrusa è orientata orizzontalmente e penetra verso il basso. Non appena l’orientamento si discosta dall’orizzontale e la direzione si discosta dal basso, la forza verticale diminuisce rapidamente.
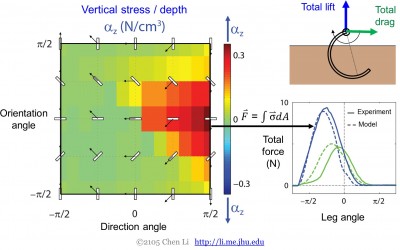
Figura 2. Misurazioni della forza resistiva e convalida della teoria. Solo le misurazioni della forza resistiva verticale sono mostrate per semplicità.
Convalida della teoria della forza resistiva
Utilizzando le nostre misurazioni della forza resistiva granulare, abbiamo integrato le sollecitazioni sugli elementi della gamba e abbiamo scoperto che la teoria della forza resistiva può prevedere bene le forze totali di sollevamento e di resistenza su una gamba del robot spostata attraverso un mezzo granulare (Fig. 2, a destra). Grazie al principio di sovrapposizione, il modello è accurato per gambe di forma e traiettoria arbitraria:
Potere predittivo della teoria della forza resistiva
Avendo convalidato la teoria della forza resistiva su una gamba di robot ruotata attraverso mezzi granulari (cinematica prescritta), abbiamo poi testato il suo potere predittivo su un robot che si muove liberamente su mezzi granulari. Abbiamo fatto girare un robot con una gamba personalizzata su un mezzo granulare con un’ampia gamma di frequenze di passo e curvatura della gamba. Come abbiamo visto in precedenza, il robot si muove più velocemente con le gambe della superficie convessa rivolte all’indietro che in avanti:
Abbiamo poi sviluppato una simulazione dinamica multi-corpo del robot, e usato la teoria delle forze resistive per calcolare le forze di sollevamento e trascinamento sul corpo del robot e sulle gambe attraverso l’integrazione delle forze elementari. Abbiamo scoperto che la dinamica del movimento prevista dalla simulazione utilizzando la teoria della forza resistiva corrisponde bene all’osservazione sperimentale:
Il confronto tra l’esperimento e la simulazione ha mostrato che la teoria della forza resistiva può prevedere accuratamente e rapidamente la locomozione delle gambe su mezzi granulari in un ampio intervallo di frequenza del passo e curvatura della gamba (Fig. 3).
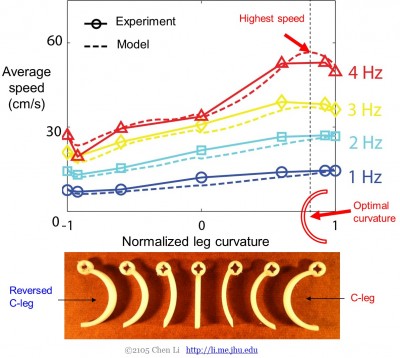
Figura 3. La teoria della forza resistiva predice il movimento del robot con le gambe su un terreno granulare.
Perché la nostra teoria della forza resistiva ha permesso la previsione quantitativa delle forze e del movimento in un terreno granulare in modo analogo all’aerodinamica e all’idrodinamica dei fluidi, abbiamo stabilito la prima terradinamica del terreno fluido.
Generalità della teoria della forza resistiva
Abbiamo fatto misure di forza resistiva per una diversità di mezzi granulari con diverse dimensioni delle particelle, forma, attrito, densità, compattazione e polidispersità. Abbiamo scoperto che la dipendenza della forza dall’orientamento e dalla direzione dell’intruso è sorprendentemente simile (Fig. 4, a sinistra).
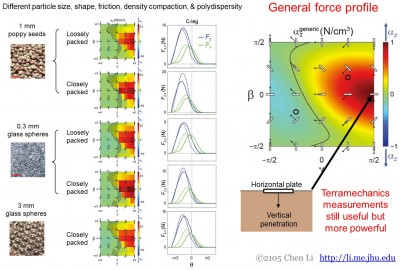
Figura 4. La generalità della teoria della forza resistiva per una diversità di mezzi granulari e il suo vantaggio pratico.
Questo fornisce un importante vantaggio pratico. Poiché questi mezzi granulari hanno lo stesso profilo generale di sollecitazione, solo una singola misurazione della forza per determinare la forza massima verticale è sufficiente per dedurre le forze per altri orientamenti e direzioni senza doverle misurare tutte (Fig. 4, a destra). Questo può essere fatto semplicemente con un penetrometro di serie. Questo significa anche che le misurazioni con una piastra orizzontale penetrante verso il basso ottenute negli studi terrameccanici possono ancora essere utilizzate, ma in modo più potente utilizzando la teoria della forza resistiva.
Infine, grazie al suo principio di sovrapposizione, la nostra teoria della forza resistiva può in linea di principio applicarsi ad animali e dispositivi di morfologia e cinematica arbitrari (dato che operano in regime di bassa velocità, non inerziale e continuo). Per esempio, abbiamo anche scoperto che la teoria che utilizza misure di forza resistiva nel piano orizzontale può prevedere il movimento della lucertola pesce sabbia all’interno di mezzi granulari.
Perché la terrameccanica classica fallisce per i rover di Marte
Nella terrameccanica classica, poiché le grandi ruote e i cingoli di solito hanno un’interfaccia con il terreno che è relativamente piatta e piana, le forze di intrusione verticale nei mezzi granulari sono caratterizzate solo muovendo una piastra orizzontale verso il basso (usando un penetrometro) (Fig. 5), ma non su un intruso in altre direzioni e orientamenti. Questo viene usato per prevedere la portanza, che viene poi bilanciata (staticamente e dinamicamente) con il peso del veicolo per prevedere l’affondamento.
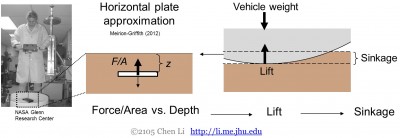
Figura 5. Figura 5. Approssimazione della piastra orizzontale prevalente nello sviluppo dei modelli terrameccanici classici.
Tuttavia, per piccole ruote di rover che si muovono su mezzi granulari sciolti (o anche ruote più grandi affondate abbastanza profondamente), l’interfaccia del terreno diventa altamente curva con orientamenti lontani dall’orizzontale. Come abbiamo dimostrato con le nostre misure di forza resistiva che tengono conto di tutti gli orientamenti e direzioni, una piastra orizzontale generalmente sperimenta una forza verticale molto maggiore di una lontana dall’orizzontale (Fig. 2, a sinistra). Di conseguenza, l’approssimazione della piastra orizzontale non si applica più, e i modelli terrameccanici classici sostanzialmente sovrastimano la forza di sollevamento e sottostimano l’affondamento.
Pubblicazioni correlate:
- Li C, Zhang T, Goldman DI (2013). A terradynamics of legged locomotion on granular media, Science, 339, 1408-1412 (Featured in Science Perspective) PDF
- Ding, Y, Li C, Goldman DI (2013). Nuotare nel deserto, Physics Today, 66, 68-69 (Invited Paper) PDF
- Maladen RD, Ding Y, Li C, Goldman DI (2009). Nuoto ondulatorio nella sabbia: locomozione subsuperficiale della lucertola pesce sabbia, Scienza, 325, 314-318 (In primo piano in Nature News & Views) PDF